 The first time I met a PR2 (personal robot 2) at Willow Garage, it rolled up to me in the hallway, paused for a long moment, suddenly spun its head around, and ran away. While that was human-safe robot behavior, it was also rude. PR2 wasn’t human-friendly… yet. That is a challenge my research has been working to address. By making robot motions more human readable, predictable, appealing, and approachable, it may be possible to improve human-robot interactions of the future to be filled with less anxiety, less awkwardness, and more fluency.
The first time I met a PR2 (personal robot 2) at Willow Garage, it rolled up to me in the hallway, paused for a long moment, suddenly spun its head around, and ran away. While that was human-safe robot behavior, it was also rude. PR2 wasn’t human-friendly… yet. That is a challenge my research has been working to address. By making robot motions more human readable, predictable, appealing, and approachable, it may be possible to improve human-robot interactions of the future to be filled with less anxiety, less awkwardness, and more fluency.
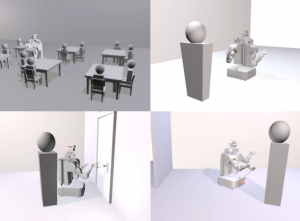
I collaborated with Doug Dooley, an amazing character animator at Pixar, and my colleague Wendy Ju, an amazing design researcher at Stanford. We’ve published some of our research together. Our animations showed a PR2 delivering a drink to a table, ushering a person in a certain direction, trying to open a door, and soliciting help from passersby to plug its power cord into an outlet. When robots showed forethought (e.g., scratching its head while thinking about opening the door) and showed goal-based reactions to their success or failure (e.g., looking sad about failing at opening the door), we saw positive effects upon people’s perceptions of the robot’s approachability, appeal, and even perceived competence.
American Public Media (APM) covered a bit of our collaboration story in a piece they produced called “A Robot Needs Hips.”
My other publications in this area include:
Weatherwax, K., Dooley, D., Carstensdottir, E., & Takayama, L. (2024). The case of the curious robot: On the social viability of curious behavior in non-human agents. Proceedings of the ACM Conference on Intelligent Virtual Agents (IVA).
Nanavati, A., Walker, N., Taber, L., Mavrogiannis, C., Takayama, L., Cakmak, M., & Srinivasa, S. (2022). Not All Who Wander Are Lost: A Localization-Free System for In-The-Wild Mobile Robot Deployments. Proceedings of Human-Robot Interaction, HRI 2022. [25% acceptance rate]
Nanavati, A., Mavrogiannis, C., Weatherwax, K., Takayama, L., Cakmak, M., & Srinivasa, S.S. (2021). Modeling Human Helpfulness with Individual and Contextual Factors for Robot Planning. Proceedings of Robotics Science and Systems (RSS), Virtual.
McHugh, S. R., Callanan, M. A., Weatherwax, K., Jipson, J. L., & Takayama, L. (2021). Unusual artifacts: Linking parents’ STEM background and children’s animacy judgments to parent–child play with robots. Human Behavior and Emerging Technologies, 3 (4), 525–539. [ PDF ]
Walker, N., Weatherwax, K., Allchin, J., Takayama, L., & Cakmak, M. (2020). Human perceptions of a curious robot that performs off-task actions. Proceedings of Human-Robot Interaction, HRI 2020, Cambridge, UK, 529-538. [24% acceptance rate]
Chung, M. J.-Y., Huang, J., Takayama, L., Lau, T. & Cakmak, M. (2016). Iterative design of a system for programming socially interactive service robots. Proceedings of the International Conference on Social Robotics: ICSR 2016.
Srinivasan, V. & Takayama, L. (2016). Help me please: Robot politeness strategies for soliciting help from humans. Proceedings of Human Factors in Computing Systems: CHI 2016, 4945-4955. [23% acceptance rate]
Alexandrova, S., Cakmak, M., Hsiao, K., & Takayama, L. (2014). Robot programming by demonstration with interactive action visualizations. Proceedings of Robotics Science and Systems: RSS 2014, Berkeley, California.
Cakmak, M. & Takayama, L. (2014). Teaching people how to teach robots: The effect of instructional materials and dialog design. Proceedings of Human-Robot Interaction: HRI 2014, Bielefeld, Germany, 431-438. [24% acceptance rate]
[ PDF ]
Chen, T., Ciocarlie, M., Cousins, S., Grice, P.M., Hawkins, K., Hsiao, K., Kemp, C., King, C.-H., Lazewatsky, D., Leeper, A.E., Nguyen, H., Paepcke, A., Pantofaru, C., Smart, W., & Takayama, L. (2013). Robots for humanity: A case study in assistive mobile manipulation. IEEE Robotics and Automation Magazine, 20 (1), 30-39.
[ PDF ]
Koenig, N., Takayama, L. & Mataric, M. (2010). Communication and knowledge sharing in human-robot interaction. Neural Networks, 23(8-9), 1104-1112.
[ PDF ]
Ju, W. & Takayama, L. (2009). Approachability: How people interpret automatic door movement as gesture. International Journal of Design, 3(2).
[ PDF ]
Takayama, L. (2011). Perspectives on agency: Interacting with and through personal robots. In Zacarias, M. & Oliveira, J. V. (Eds.), Human-Computer Interaction: The Agency Perspective. Springer.
[ PDF ]
Cakmak, M. & Takayama, L. (2013). Towards a comprehensive chore list for domestic robots. Proceedings of Human-Robot Interaction: HRI 2013 (Late Breaking Report), Tokyo, Japan, 93-94.
[ PDF ]
Chen, T., Ciocarlie, M., Cousins, C., Grice, P., Hawkins, K., Hsiao, K., Kemp, C., King, C.-H., Lazewatsky, D., Leeper, A., Nguyen, H., Paepcke, A., Pantofaru, C., Smart, W., & Takayama, L. (2013). Robots for humanity: User-centered design for assistive mobile manipulation. Proceedings of Intelligent Robots and Systems: IROS 2012, Algarve, Portugal, 5434-5435.
[ Video ]
Leeper, A., Hsiao, K., Ciocarlie, M., Takayama, L., & Gossow, D. (2012). Strategies for human-in-the-loop robotic grasping. Proceedings of Human-Robot Interaction: HRI 2012, Boston, MA, 1-8. [25% acceptance rate]
[ PDF ]
Ju, W. & Takayama, L. (2011). Should robots or people do these jobs? A survey of robotics experts and non-experts about which jobs robots should do. Proceedings of Intelligent Robotic Systems: IROS 2011, San Francisco, CA, 1158-1166. [32% acceptance rate]
[ PDF ]
 Paepcke, S. & Takayama, L. (2010). Judging a bot by its cover: An experiment on expectation setting for personal robots. Proceedings of Human-Robot Interaction: HRI 2010, Osaka, JP, 45-52. [21% acceptance rate]
Paepcke, S. & Takayama, L. (2010). Judging a bot by its cover: An experiment on expectation setting for personal robots. Proceedings of Human-Robot Interaction: HRI 2010, Osaka, JP, 45-52. [21% acceptance rate]
[ PDF ]
Goodfellow, I., Koenig, N., Muja, M., Pantofaru, C., & Takayama, L. (2010). Help me help you: Interfaces for personal robots. Late breaking results of Human-Robot Interaction: HRI 2010, Osaka, JP, 187-188.
[ PDF ]
Takayama, L., Pantofaru, C. (2009). Influences on proxemic behaviors in human-robot interaction. Proceedings of Intelligent Robotic Systems: IROS 2009, St. Louis, MO, USA, 5495-5502.
[ PDF ]
Takayama, L., Groom, V., & Nass, C. (2009). I’m sorry, Dave: I’m afraid I won’t do that: Social aspects of human-agent conflict. Proceedings of Human Factors in Computing Systems: CHI 2009, Boston, MA, USA, 2099-2108. [25% acceptance rate]
[ PDF ]
Groom, V., Takayama, L., & Nass, C. (2009). I am my robot: The impact of robot-building and robot form on operators. Proceedings of the Human-Robot Interaction: HRI 2009, San Diego, CA, USA, 31-36. [19% acceptance rate; nominated for best paper]
[ PDF ]

Ju, W., Takayama, L., & Nass, C. (2008). Approachability: How people interpret automatic door movement as gesture. Proceedings of Design and Emotion, Hong Kong, CN.
[ PDF ]
Takayama, L., Ju, W., & Nass, C. (2008). Beyond Dirty, Dangerous and Dull: What everyday people think robots should do. Proceedings of the Human-Robot Interaction: HRI 2008, Amsterdam, NL, 25-32. [36% acceptance rate]
[ PDF ]
Pantofaru, C. & Takayama, L. (2011). Need finding: A tool for directing robotics research and development. RSS 2011 workshop perspectives and contributions to robotics from the human sciences.
[ PDF ]
Takayama, L. (2009). Toward a science of robotics: Goals and standards for experimental research. RSS 2009 workshop on good experimental methodology in robotics.
[ PDF ]
This is a subset of my publications. To see ’em all, go here.